Роботы среди нас: как создать интеллектуального помощника по дому
Содержание:
Робот из консервной банки с магнитом
Увлекательные игры для развития детей разрешается проводить, пользуясь пустыми консервными банками. Также подойдут небольшие магниты, болтики, крышки из-под бутылок и другие приспособления.
Из каких же элементов можно сделать самостоятельно интересные поделки роботов. Ребёнок от такого будет в восторге. Основная часть поделки — это консервная банка. К ней будут присоединены разные части тела.
Для лёгкой смены деталей на теле, присоедините к ним магниты на клей. Когда ребёнок хочет что-то взять, достаточно лишь поднести маленькую банку к предмету, и всё примагнититься к ней.
Если предоставить творческому чаду необходимый запас материала для опытов, он сможет сделать самых различных роботов. Осталось только запастись терпением и можно приступать к работе.
Смешные роботы — поделки готовы! С такими игрушками дети будут увеличены ими долгое время.
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

Простейший робот
Как сделать легкого робота в домашних условиях? Сложно создать полноценную автоматизированную машину, а вот минимальную конструкцию собрать все-таки можно. Рассмотрим простейший механизм, который, к примеру, сможет совершать определенные действия в одной зоне. Понадобятся следующие материалы:
-
Пластиковая тарелка.
-
Пара щеток среднего размера для чистки обуви.
-
Компьютерные вентиляторы в количестве двух штук.
-
Разъем для батарейки 9-в и сама батарея.
-
Хомут и стяжка с функцией защелкивания.
-
Гайки.
Просверливаем в тарелке для щеток два отверстия с одинаковым расстоянием. Крепим их. Щетки должны располагаться на одинаковом расстоянии от друг друга и середины тарелки. С помощью гаек прикрепляем к щеткам регулировочное крепление. В среднее расположение устанавливаем ползунки от креплений. Для движений робота необходимо использовать компьютерные вентиляторы. Они подключаются к батарейке и параллельно размещаются, чтобы обеспечить вращение машины. Это будет некий вибрационный моторчик. В завершение необходимо накинуть клеммы.
В данном случае не потребуется больших финансовых затрат или какого-либо технического или компьютерного опыта, ведь здесь подробно описано, как сделать робота в домашних условиях. Достать необходимые детали нетрудно. Для улучшения двигательных функций конструкции можно использовать микроконтроллеры или дополнительные моторчики.
Обзор
Это первая часть в серии статей о моем опыте создания робота, который может делать разные вещи. Я думал, что было бы замечательно создать робота, которого легко было бы собрать лишь с одним паяльником, и комплектующие к нему были бы доступны. Я составил следующий список требований к этому роботу:
- Многие наборы стоят дорого, поэтому он должен быть относительно недорог.
- Он должен быть простым в сборке, не требуя специального оборудования.
- Он должен быть простым в программировании, не требуя сложных IDE и программатора.
- Он должен быть мощным для расширяемости.
- Он должен запускаться от простого источника питания.
- Он должен быть способен следовать за линией или за стеной и избегать препятствий.
В этой статье я расскажу, как я решил выполнить эти требования.
Мобильный механизм собственного изготовления
Даже без специализированных, и обычно дорогостоящих, наборов, вполне возможно сделать механический манипулятор подручными средствами. Итак, загоревшись замыслом создания робота, следует внимательно проанализировать запасы домашних закромов на предмет наличия невостребованных запчастей, которые могут быть использованы в этой творческой затее. В ход пойдут:
- моторчик (например, от старой игрушки);
- колёса от игрушечных автомобилей;
- детали конструкторов;
- картонные коробки;
- стержни авторучек;
- скотч разных видов;
- клей;
- пуговицы, бусинки;
- винтики, гайки, скрепки;
- всевозможные провода;
- лампочки;
- батарейка (подходящая моторчику по напряжению).

С помощью этих общедоступных составляющих можно сотворить настоящее техническое чудо.
Итак, для того чтобы сделать собственного робота из доступных в домашних условиях материалов, следует:
- подготовить найденные детали для механизма, проверить их работоспособность;
- нарисовать макет будущего робота, учитывая наличное оборудование;
- сложить корпус для робота из конструктора или картонных деталей;
- приклеить или спаять запчасти, отвечающие за движение механизма (например, скрепить моторчик робота с колёсной базой);
- обеспечить электропитание мотора, присоединив его проводником к соответствующим контактам батарейки;
- дополнить тематический декор прибора.
Сделать механизм такого робота можно за несколько часов, после чего остаётся придумать роботу имя и представить восхищенным зрителям. Наверняка некоторые из них подхватят новаторскую задумку и смогут смастерить собственных механических персонажей.
Нейронаука для роботов
По своему устройству роботы нередко копируют человека
Это касается той части роботов, которым важно имитировать человеческие действия и поведение — индустриальным машинам нейронауки не так важны
Самое очевидное, что могут использовать при разработке робота — делать его внешне похожим на человека. Роботы часто имеют две руки, две ноги и голову, даже если это не обязательно с инженерной точки зрения
Особенно это важно в тех случаях, когда робот будет взаимодействовать с людьми — похожей на нас машине проще доверять
Известный во всем мире робот Pepper из Японии — пример робота, внешне похожего на человека
(Фото: Unsplash)
Можно сделать так, чтобы не только внешний вид, но и «мозг» робота был похож на человеческий. Разрабатывая механизмы восприятия, обработки информации и управления, инженеры вдохновляются устройством нервной системы людей.
Например, глаза робота — телекамеры, которые могут двигаться в разных направлениях — имитируют зрительную систему человека. Опираясь на знание о том, как устроено зрение человека и как происходит обработка зрительного сигнала, инженеры проектируют сенсоры робота по тем же принципам. Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.
Индустрия 4.0
Что такое компьютерное зрение и где его применяют
У человека есть вестибулоокулярный рефлекс: глаза при перемещении стабилизируются с учетом вестибулярной информации, что позволяет сохранять стабильность картинки, которую мы видим. На теле робота также могут быть датчики ускорения и вертикализации. Они помогают роботу учитывать движения тела для стабилизации зрительного восприятия внешнего мира и совершенствования ловкости.
Кроме того, робот может ощущать точно так же, как человек — на роботе может быть кожа, он может чувствовать прикосновение. И тогда он не просто произвольно движется в пространстве: если он дотрагивается до препятствия, он его ощущает и реагирует так же, как человек. Он может использовать эту искусственную тактильную информацию и для схватывания предметов.
Тактильные сенсоры позволяют этой роботизированной руке манипулировать мелкими предметами, в том числе стеклянными шариками
У роботов можно имитировать даже болевые ощущения: какое-то прикосновение ощущается нормально, а какое-то вызывает боль, что в корне меняет поведение робота. Он начинает избегать боли и вырабатывает новые модели поведения, то есть обучается — как ребенок, который впервые обжегся чем-то горячим.
Не только сенсорные системы, но и управление своим телом у робота можно спроектировать по аналогии с человеком. У людей ходьбой управляют так называемые центральные генераторы ритма — специализированные нервные клетки, предназначенные для контроля автономной моторной активности. Есть роботы, в которых для управления ходьбой была использована та же идея.
Кроме того, роботы могут обучаться у людей. Робот может совершать действия бесконечным числом способов, но если он хочет имитировать человека, он должен наблюдать за тем, как человек это делает, и пытаться повторить это движение. При совершении ошибок он сравнивает это с тем, как это же действие совершает человек.
Робот из картонных коробок
Если не выбрасывать картонные коробки, а собрать их в достаточном количестве, то можно подбросить ребенку идею сделать чудного робота своими руками. Для работы приготовьте такие материалы:
- три коробки из картона разных размеров;
- фигурную упаковку от какой-нибудь запчасти;
- две круглые формы для кексов из фольги;
- синельную проволоку;
- два картонных рулона от пищевой фольги;
- две основы от новогодней хлопушки;
- две бобины от скотча;
- два CD-диска.

Приступаем к сборке нового изделия. Прежде всего, коробки следует вывернуть наизнанку, чтобы убрать с глаз долой различные надписи. Можете не выворачивать, но тогда придется обклеить коробки цветной бумагой или фольгой. Самую маленькую коробку – голову – соединяем с самой большой – туловищем при помощи бобины от скотча – шеи. Можно воспользоваться клеем, а можно работать двусторонним скотчем.

Теперь приделываем роботу штанишки – к туловищу приклеиваем коробку средних размеров.
Руки – рулоны от пищевой фольги – и ноги – основы от новогодних хлопушек – привязываем веревками. Посередине на грудь приклеиваем для объемности фигурную упаковку, а штанишки украшаем двумя дисками.

На лицевой стороне головы прорезаем два круга и вставляем в отверстия формы для кексов – это наши глаза. Рот и сигнальные антенны на макушке делаем из закрученной проволоки.

Оставшуюся бобину из-под скотча разрезаем пополам и приклеиваем по бокам головы – это уши нашей игрушки.

Если малышу захочется, он может украсить своего нового друга аппликацией и даже на следующий день отнести в детский сад, чтобы похвастаться перед одногодками.

Печатная плата и электронные элементы
-
Программируемый контроллер Arduino Nano.
-
2 бесшумных шаговых двигателя TMC2130.
-
4 цилиндрических алюминиевых конденсатора на 10 мкФ.
-
1 конденсатор 1206 на 330 мкФ.
-
1 конденсатор 1206 на 100 мкФ.
-
1 линейный регулятор напряжения LM7805 TO-252.
-
2 диода Шоттки MDD SS14, DO-214.
-
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
-
2 четырёхштырьковые гнездовые колодки с JST.
-
1 трёхштырьковая гнездовая колодка с JST.
-
Источник питания: 7–35 В, мин. ток 1,5 A.
Шаг 1. Как создаётся художественная работа


Вначале я рекомендую посмотреть видео – вы поймёте, как ведёт себя робот в действии и как его настраивать для создания художественной работы. Говорят, изображение заменяет тысячу слов, и теперь представьте, сколько слов заменит видео, в котором изображения сменяют друг друга 30 раз в секунду!
Чтобы использовать робот для рисования, зажимами я закрепил на его раме чистый холст. Затем я подвесил рисующую головку и перебросил ремни через шаговые двигатели, расположенные на углах рамы робота, и отцентрировал рисующую головку (перевел её в домашнее положение). В рисующую головку вставил перманентный маркер. Затем подключил робот по USB-кабелю к компьютеру, на котором запустил управляющее программное обеспечение. В компьютер я загрузил чёрно-белое изображение, созданное в программе Photoshop, а затем разместил рисующую головку в том месте холста, откуда должна начаться прорисовка. Чтобы рисующая головка попала в нужное положение, я отправлял на робот команды перемещения в пределах ограничительной рамки и подгонял расположение изображения до тех пор, пока оно не оказалось именно там, где нужно. Затем я дал команду отправки изображения на робот.
Наконец, робот завершил свою работу – на холсте появилось чёрно-белое изображение. И вот настал момент, когда я смог почувствовать себя настоящим художником. Я взял обычную акриловую краску, разбавленную двумя частями клея для декупажа Mod Podge. В итоге я получил акриловую глазурь, которую нанес поверх чёрных деталей. Холст окрасился красивыми цветами, при этом все чёрные детали сохранились и благодаря глазури приобрели особый блеск.И вы можете создать нечто такое же, это потрясающе!
Как сделать легендарный робот «Canbot»
Перевел SaorY для mozgochiny.ru
Доброго времени суток, мозгоинженеры! Сегодня вас ожидает лаконичный инструктаж по сборке забавного робота из 3D-печатных деталей и Attiny85, и который управляется, конечно, дистанционно.
Шаг 1: Необходимые компоненты
Верхняя и нижняя части самоделки печатаются плоской стороной вниз, с активной опцией «поддерживающие структуры» (support). В зависимости от типа принтера и сервоприводов распечатанные детали возможно придется немного зачистить.
canbot3dparts
Шаг 2: Электроника
Сервоприводы настраиваются на режим непрерывного вращения, и для этого есть хороший мозгомануал. Электрокомпоненты собираются в цепь согласно представленной схеме, при этом возможно более удобно будет использовать небольшой кусочек макетной платы и тонкие проводки.
Шаг 3: Программирование микроконтроллера
Запрограммировать самоделку можно как настоящий программист и написав код самостоятельно, либо загрузить готовый код из этой мозгостатьи.
Инфракрасный приемник лучше всего работает с пультами Sony. Понадобится «перепрошить» код Arduino и вывод данных через функцию Serial.print (), чтобы таким образом узнать, какую кодировку имеет каждая кнопка.
canbotsketch
Шаг 4: Сборка робота
Компоненты мозгоподелки размещаются внутри распечатанных деталей и закрепляются горячим клеем. Верхнюю и нижнюю части корпуса робота-самоделки можно скрепить винтами, идущими в комплекте с сервоприводами.
Вот и все, быстро и просто ???? Всем удачи и успехов!
(A-z Source)
Полезные советы
Для того чтобы работа приносила вам только радость, прочитайте эти нехитрые советы:
- Не приклеивайте коробки друг к другу с помощью клея ПВА — он размачивает картон и не дает изделию хорошо держаться. Также не стоит прибегать к помощи клея-карандаша — он слишком ненадежный. Оптимальным решением будет клей — момент или клеевой пистолет.
- Дайте хорошо просохнуть слою с водоэмульсионной краской, прежде чем покрывать изделие краской из баллончика.
- Обрабатывайте своего робота краской из баллончика только на улице, балконе или в подъезде, чтобы не допускать вдыхания большого количества вредных испарений.
Картонный робот
Как сделать робота в домашних условиях, если его требует ребенок? Можно придумать интересную игрушку из простого картона.
Необходимо запастись:
- двумя картонными коробками;
- 20 крышками от пластиковых бутылок;
- проволокой;
- скотчем.
Для начала необходимо использовать коробку в качестве туловища для робота и вырезать у нее дно. Затем нужно сделать 5 отверстий: под голову, для рук и ног. В коробке, предназначенной для головы, нужно сделать одно отверстие, которое поможет соединить ее с туловищем. Для скрепления частей робота используется проволока.
После присоединения головы нужно подумать, как сделать руку робота в домашних условиях. Для этого в боковые отверстия просовывается проволока, на которую надеваются пластиковые крышки. Получаем подвижные руки. Так же поступаем и с ногами. Сделать отверстия в крышках можно шилом.
Если вы решили склеить между собой коробки, то не переусердствуйте с количеством клея. Лучше пользоваться прочным картоном или бумагой.
Простой бумажный робот
Схемы простых роботов на нескольких транзисторах, реализующие следование за светом.
Чтобы создать поделку робот из бумаги необходимо запастись следующими материалами:
- схема робота;
- лист бумаги;
- ножницы;
- клей.
Помимо того может понадобится также картон, иголка или шило, фломастеры и резинки для соединения частей.
На схемах можно увидеть несколько типов линий. Разрез ножницами предусмотрен по сплошной линии. Пунктирные очертания предназначены для сгибания бумаги.
При необходимости сделать отверстия, используете иглу или канцелярский нож до вырезания макета. Для наглядного представления готовой игрушки согните все части по пунктирным линиям, как видно на фото поделки робот.
Поделку робот из картона делают так:
- сделать распечатку схемы на картоне;
- ножницами вырезать все части схемы, действуя по инструкции;
- вырезанные детали сгибаем по пунктирным линиям;
- соединяем необходимые части с помощью клея;
- делаем сбор всех деталей робота в одну бумажную конструкцию, следуя инструкции.
Описание
Это агрегат с искусственным интеллектом, предназначение которого – автоматическая уборка помещений. Современное устройство зачастую имеет форму диска диаметром около 30 и высотой 10 см. Передняя часть робота оборудована большим контактным сенсором (бампером), который помогает ему избегать столкновений с препятствиями. Работает такой помощник на внутренних аккумуляторах, а подзаряжается от базы (специальный модуль), которую сам находит и подключается после выполнения уборки. Заряжается он от двух до пяти часов в зависимости от типа используемого аккумулятора.
Домашний робот в процессе уборки автономно движется по поверхности, собирая мусор по пути. С помощью специальных алгоритмов он решает, как преодолеть встретившееся препятствие. Благодаря небольшой высоте этот «умный» пылесос легко проходит под кроватью или другой мебелью. Если он все же застрянет и не сможет двигаться, то звуковыми сигналами известит об этом хозяина.

Информация о трансформерах
Трансформеры — это не только герои мультфильмов и кинофильмов, но в первую очередь персонажи комиксов.
![]()
Именно комиксы про данных персонажей появились первыми, а затем их экранизировали. Эти герои сразу стали любимы не только детьми, но и многими взрослыми, так как после комиксов первыми появились фильмы.
![]()
![]()
Кто-то становится автомобилями, другие могут быть летающей техникой, а третьи и вовсе железнодорожной, строительной и прочими вариантами. Персонажи подразделяются на десептиконов и автоботов, которые между собой враждуют.
![]()
По сюжетам фильмов десептиконы нападают на дом автоботов, а те стремятся защитить его и другие планеты.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Самым популярным персонажем во вселенной трансформеров считается автобот Бамблби. Он имеет множество особенностей, главная из которых — его размеры.
![]()
По сравнению с остальными автоботами данный герой очень мал, но более подвижен.
![]()
Основной цвет Бамблби — желтый, но многие детали в его конструкции черные. Самым простым решением будет сделать мини робота трансформера из лего, так как он прост.
![]()
Схемы создания из металлического конструктора
Сборка робота из металлического конструктора начинается с изготовления маленьких и несложных моделей. Постепенно, по мере роста и дальнейшего развития ребёнка, подростка, задачи усложняются, собираемые роботы растут в численности используемых деталей. Профессиональные сборки робототехники включают в себя больше тысячи деталей из нескольких одинаковых и/или разных комплектов. Чтобы собрать такого робота, могут потребоваться солнечные панели, аккумуляторы, двигатели, возможно, датчики и микроконтроллеры: чем шире и разнообразнее оснастка, тем «умнее» собранная установка, что шаг за шагом приближает юного любителя мастерить к серьёзному роботоконструированию. Для создания простейшего (немеханизированного) робота из стального конструктора выполните следующие шаги.
-
Используйте две загнутые с обоих торцов металлические пластины. Прикрепите к ним с одной из сторон – сверху, с одного из торцов более короткую, не загнутую. Все соединения выполняются винтово-гаечными соединениями.
-
К нижним торцам – стопам робота – сзади привинтите маленькие (до 1 см) уголки. Длина ног – до 10 см, но это поможет роботу стоять на них уверенно.
-
Начните собирать туловище: прикрепите к горизонтальной перекладине продольный уголок с треугольным построением из сплошной стали. В верхушке имеются посадочные отверстия.
-
Прикрепите к треугольной пластине заднюю прямоугольную – это будет спина роботоконструкции.
-
В центральной части к задней планке сверху прикрутите полоску стали на два отверстия – она послужит шеей конструкции. Затем спереди наденьте и затяните переднюю планку – она послужит как бы грудью и животом (передняя часть туловища робота).
-
В качестве рук установите гнутые металлические полосы с вырезанной центральной канавкой. Привинтите их по бокам туловища.
-
В качестве головы – меньшая по размеру, чем внизу, рядом с бёдрами, треугольная деталь на три отверстия. За нижнее – центральное – отверстие привинтите её к шее. Макет готов, осталось лишь загнуть боковые пластины спереди, чтобы в них зажать, к примеру, карандаш, установленный вертикально.
-
Получился «канцелярский» робот – держатель для карандаша. Если доработать конструкцию, то к рукам можно привинтить посудину, в которой карандаши и ручки стояли бы вертикально.
-
Конструкция может быть и массивной, собранной «по-взрослому», из профстали: применяются квадратные и прямоугольные профтрубы, круглые (обычные трубы), уголки. А также используются шарикоподшипниковые комплекты, шестерёнки, полосы и пластины, и другие элементы. Робот с шестерёнками имеет смысл моторизовать, а для большей сферы использования данная установка оснащается электронно-механическим управлением с программным блоком. Такая работа вполне по силам подростку лет 13-14, осваивающему работу на токарном и фрезеровальном станках.
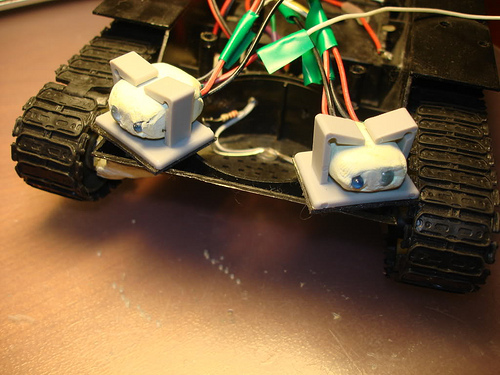
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.
Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.
Промышленные роботы
Роботы последнего поколения подвижны и эффективны. Они упаковывают товары, наклеивают этикетки, сортируют товары на складе. Некоторые могут обрабатывать деревянные и металлические изделия.
KUKA KR QUANTEC PA

Образцовый укладчик, похожий на большую механическую руку. Он работает при низкой температуре и поэтому востребован в пищевой промышленности, где нужно хранить грузы в морозильной камере.
Машине не нужен подогрев или защита от холода. Это обеспечивает минимальный износ оборудования. Kuka также занимается упаковкой товаров, выборочным комплектованием и другими операциями манипулирования.
FANUC M-2000iА

Японские роботы этой серии захватывают и перевозят тяжести. Они исполняют роль погрузчика, причём без участия оператора. FANUC – прочный шестиосный аппарат с самой большой грузоподъёмностью в мире (до 1,2 тонны).
Работа ведётся от 0 до +45 градусов, а длинная механическая рука может дотянуться к объекту так же, как это делает подъёмный кран.
Universal Robots

Это серия универсальных манипуляторов. Модель UR10 становится «третьей рукой» человека и помогает проводить литьевые или сварочные работы быстрее.
Другие версии Universal Robots завинчивают детали, подготавливают материалы для 3D-печати, складируют товары.
Датчики препятствий
Чтобы наш робот мог ориентироваться и не врезался во всё, мы установим на него два инфракрасных датчика. Самый простейший датчик состоит из ик-диода, который излучает в инфракрасном спектре и фототранзистор, который будет принимать сигнал с ик-диода. Принцип такой: когда перед датчиком нет преграды, то ик-лучи не попадают на фототранзистор и он не открывается. Если перед датчиком препятствие, тогда лучи от него отражаются и попадают на транзистор – он открывается и начинает течь ток. Недостаток таких датчиков в том, что они могут по-разному реагировать на различные поверхности и не защищены от помех — от посторонних сигналов других устройств датчик, случайно, может сработать. От помех может защитить модулирование сигнала, но пока мы этим заморачиватся не будем. Для начала, и этого хватит.
Можно ли собрать робота самостоятельно?
Сейчас сложно кого-то удивить игрушкой-роботом. Современная технологическая и компьютерная индустрия шагнула далеко вперед. Но все же вас может удивить информация о том, как сделать простого робота в домашних условиях.
Бесспорно, сложно понять принцип работы различных микросхем, электроники, программ и конструкций. Сложно обойтись в данном случае без базовых знаний в области физики, программирования и электроники. Даже несмотря на это, каждому человеку по силам собрать робота самостоятельно.
Роботом называется автоматизированная машина, которая способна выполнять различные действия. В случае с самодельным роботом достаточно и того, что машина просто передвигается.
Облегчить сборку помогут подручные средства: телефонная трубка, пластиковая бутылка или тарелка, зубная щетка, старый фотоаппарат или компьютерная мышь.
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
К роботам-учёным безусловно можно отнести роботов, с помощью которых исследовались вентиляционные шахты Большой Пирамиды Хеопса. С их помощью были открыты т. н. «дверки Гантенбринка» и т. н. «ниши Хеопса». Исследования продолжаются.
Система передвижения
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).
Роботы BigDog
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах роботы передвигаются вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным или вертикальным плоскостям, по трубам используются системы, аналогичные «шагающим» конструкциям, но с вакуумными присосками.
Также известны роботы, использующие принципы движения живых организмов — змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.
Робот Tuna
Система распознавания образов
Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
Двигатели
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.
Математическая база
Робот Aibo
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.
Навигация
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).
Внешний вид
В Японии не прекращаются разработки роботов, имеющих внешний вид, на первый взгляд неотличимый от человеческого. Развивается техника имитации эмоций и мимики «лица» роботов.
В июне 2009 года ученые Токийского университета представили человекоподобного робота «KOBIAN», способного выражать свои эмоции — счастье, страх, удивление, грусть, гнев, отвращение — с помощью жестов и мимики.
Робот KOBIAN
Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Производители роботов
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших — iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Робот из консервной банки с магнитом
Увлекательные игры для развития детей разрешается проводить, пользуясь пустыми консервными банками. Также подойдут небольшие магниты, болтики, крышки из-под бутылок и другие приспособления.
Из каких же элементов можно сделать самостоятельно интересные поделки роботов. Ребёнок от такого будет в восторге. Основная часть поделки — это консервная банка. К ней будут присоединены разные части тела.
Для лёгкой смены деталей на теле, присоедините к ним магниты на клей. Когда ребёнок хочет что-то взять, достаточно лишь поднести маленькую банку к предмету, и всё примагнититься к ней.
Если предоставить творческому чаду необходимый запас материала для опытов, он сможет сделать самых различных роботов. Осталось только запастись терпением и можно приступать к работе.
Смешные роботы — поделки готовы! С такими игрушками дети будут увеличены ими долгое время.
Киборг из коробки
Одно из самых простых решений на пути к тому, чтобы сделать робота – приобрести готовый набор для робототехники с пошаговым руководством. Этот вариант подойдёт также тем, кто собирается серьёзно заниматься техническим творчеством, ведь в одном пакете находятся все необходимые детали для механики: от электронных плат и специализированных датчиков, до запаса болтиков и наклеек. Вместе с инструкциями, позволяющими создать довольно сложный механизм. Благодаря множеству аксессуаров такой робот может послужить отличной базой для творчества.
Основных школьных знаний по физике и навыков с уроков труда вполне достаточно для сборки первого робота. Разнообразные сенсоры и моторы подчиняются пультам управления, а специальные среды программирования позволяют создать настоящих киборгов, умеющих выполнять команды.
Например, датчик механического робота может фиксировать наличие или отсутствие поверхности перед прибором, а программный код указывать, в какую сторону следует поворачивать колёсную базу. Такой робот ни за что не упадёт со стола! Кстати, по схожему принципу работают настоящие роботы-пылесосы. Помимо проведения уборки по заданному расписанию и умения вовремя возвращаться на базу для подзарядки, этот интеллектуальный помощник может самостоятельно строить траектории уборки помещения. Поскольку на полу могут располагаться разнообразные препятствия, такие как стулья и провода, роботу приходится постоянно сканировать предлежащий путь и огибать такие помехи.
Для того чтобы собственноручно созданный робот умел выполнять различные команды, производители предусматривают возможность его программирования. Составив алгоритм поведения робота в различных условиях, следует создать код взаимодействия датчиков с окружающим миром. Это осуществимо благодаря наличию микрокомпьютера, являющегося мозговым центром такого механического робота.

Заключение
В этой статье мы рассмотрели базовую структуру промышленных роботов. Теперь вы имеете представления какие компоненты составляют основу робота и где они расположены. Многие могут подумать, что нет необходимости знать как робот устроен, при рассмотрении вопроса внедрения роботов на свое производство. Тем не менее, эти общие знания помогут определить какой именно робот вам нужен, с каким потенциалом движений, точностью, количеством осей и каким инструментом оснастить для решения ваших производственных задач.
В нашем каталоге вы найдете подробные спецификации по роботам, а также информацию по их возможностям.
Чтобы выполнить вашу производственную задачу наиболее эффективным способом потребуется наиболее подходящий робот. Наши сотрудники всегда рады будут помочь в подборе робота и инструмента для него.